Over 30% of candidate drugs fail clinical trials due to uncontrollable toxicity caused by systemic off-target effects. Addressing this challenge through precise drug delivery strategies could revive these discarded therapies by mitigating systemic toxicity, thereby transforming promising drug candidates into viable treatments. Magnetic soft robots, capable of operating in hard-to-access anatomical regions, represent a transformative advancement in targeted drug delivery. However, achieving robust in vivo functionality for active drug delivery remains challenging. This requires innovative base materials that simultaneously satisfy mechanical robustness, biocompatibility, and responsiveness to external stimuli, as well as optimized interactions between materials and magnetic functional units to prevent failure caused by magnetic component leakage.
Recently, the research team led by Dr. Huang Wenwen from Zhejiang University published an Inside Front Cover article in Advanced Science, introducing a synergistic strategy that integrates genetic engineering and electrochemical engineering to construct a protein-based magnetic soft robot. Leveraging in-situ magnetization of electrochemically generated coordination sites, the team employed classical crystal nucleation-growth theory and interdisciplinary methodologies—including genetic engineering, electrochemistry, and microfabrication—to design, fabricate, and functionalize stimuli-responsive recombinant protein hydrogels from the molecular level via a "bottom-up" approach. This breakthrough offers a novel fabrication strategy for precision drug delivery systems.
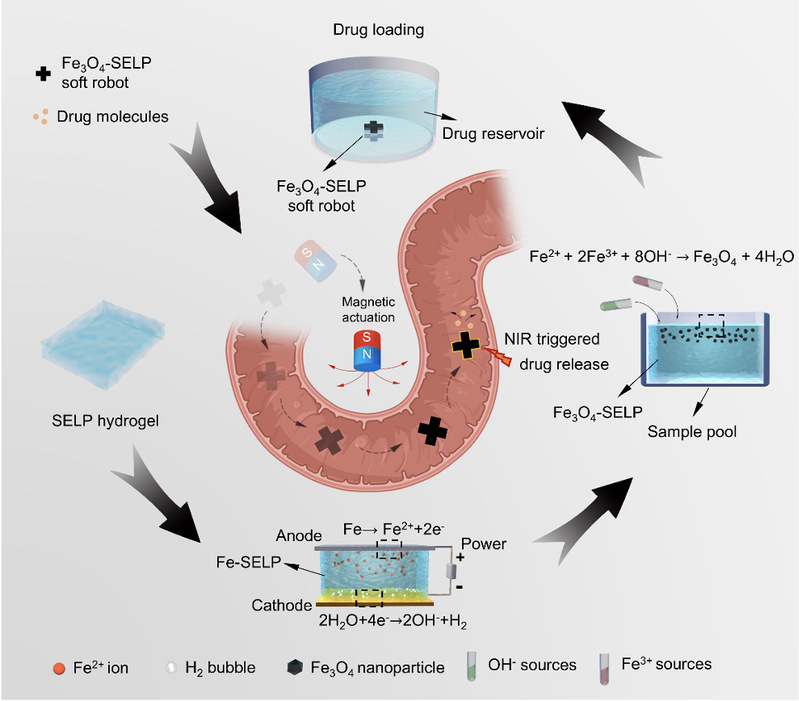
Building on their prior development of a temperature-responsive recombinant silk-elastin-like protein (SELP) hydrogel, the authors utilized electrochemical techniques to establish ion-protein coordination sites within the hydrogel network. By tailoring electrode pattern and optimizing electric field parameters (voltage, duration), these sites were functionalized as nucleation centers for superparamagnetic nanocrystals under controlled ion supply and growth conditions. Combined with microfabrication, this approach enabled the creation of a protein-based magnetic soft robot.
The flexibility and compatibility of electrochemical methods allowed magnetic material patterning and reprogrammable actuation behaviors (e.g., controlled bending/unfolding) through electrode geometry optimization. Furthermore, the "in-situ magnetization via electrochemically created coordination sites" strategy endowed the robot with enhanced mechanical properties and multi-physical field responsiveness. The improved mechanical integrity facilitates encapsulation into minimally invasive delivery systems (e.g., capsules or catheters), while the superparamagnetic nanocrystals act as a magnetic field-responsive medium for precise locomotion control. Additionally, the nanocrystals’ photothermal conversion capability serves as an on-demand drug release trigger, utilizing a photothermal effect to release payloads stored within the hydrogel matrix.
In summary, this work synergizes genetic and electrochemical engineering to establish a protein-based magnetic soft robot for active drug delivery. The strategy’s design flexibility, tunability, and processing simplicity position it as a promising platform for advancing medical robotics and precision therapeutics.
Authorship and Acknowledgments
Hang Zhao (Ph.D. candidate) is the first author. Co-authors Bo Yu (Class of 2022 undergraduate), Dingyi Yu (Ph.D. candidate), and Dongfang Xiao (Class of 2023 undergraduate) from the Zhejiang University-University of Edinburgh Institute contributed critically to this work. Dr. Qi Zhou (University of Edinburgh) provided essential support during manuscript preparation and revision. Dr. Huang Wenwen (Zhejiang University-University of Edinburgh Institute) is the sole corresponding author. This research was funded by the National Natural Science Foundation of China and the Zhejiang Provincial Natural Science Foundation.
Article Link: https://advanced.onlinelibrary.wiley.com/doi/10.1002/advs.202503404





