软体机器人具有驱动本体一体化、灵活、体积小、质量轻、环境适应性好、噪声低等优势,能够适应非结构化环境并执行各种复杂任务,在医疗医药、人机交互、灾难救援等领域展现出巨大的应用潜力。然而,软材料的设计、调控和加工方法较为复杂,如何将多种响应特性有效集成,构建自驱动且生物兼容的医疗医药软体机器人,仍然具有挑战性。
近日,浙江大学黄雯雯研究员团队在国际知名期刊Advanced Healthcare Materials上发表封底(back cover)文章,提出了一种将基因工程和化学工程协同整合的仿生策略,构建了具有可编程、可自驱动并进行复杂空间变形的蛋白质水凝胶软体机器人。该论文被网易号、MaterialsViews、水凝胶科学等多个知名科普平台报道。
该研究从自然界中蛋白质翻译后修饰汲取灵感,利用基因工程、材料化学、多尺度模拟等多学科交叉手段,从分子水平上“自下而上”地从头设计、制备、修饰、优化了具有特定刺激响应性的重组蛋白水凝胶,为构建生物医用软体机器人提供了新的方法。如下图所示,通过基因工程策略,作者设计了具有客制化刺激响应性的重组类丝弹性蛋白水凝胶。同时,化学工程被用作二级控制点特异性调控酪氨酸侧链的理化特性,实现了刺激响应水凝胶的图案化和驱动行为重编程。
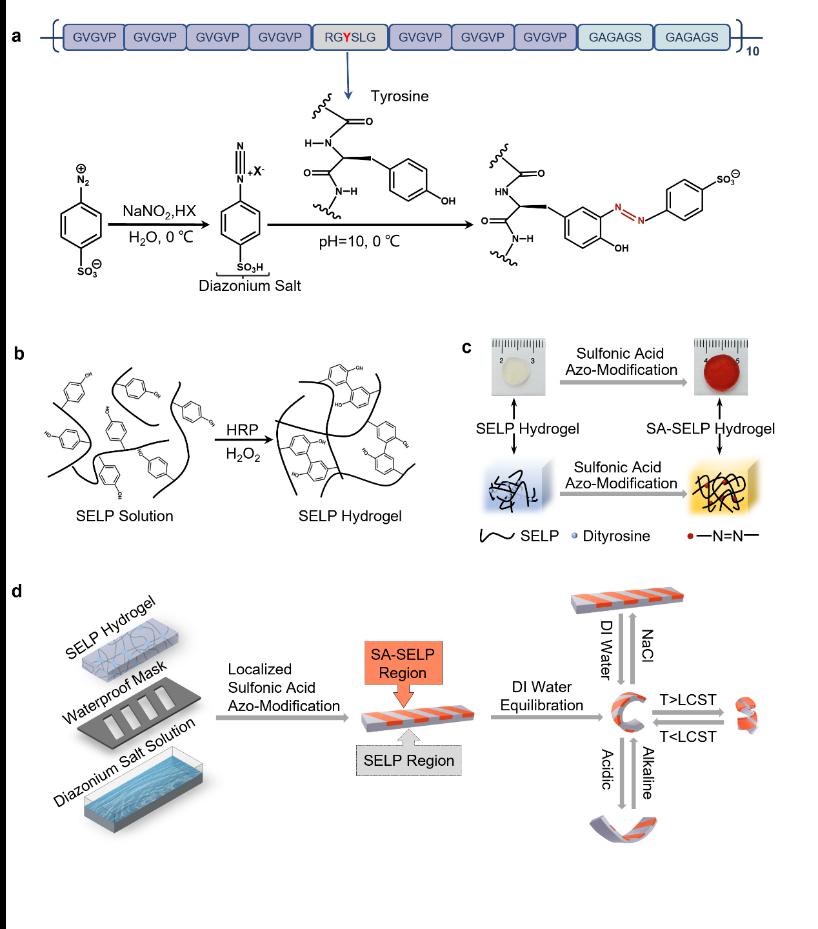
在温度变化下基于LCST的不对称溶胀、在离子强度或 pH 值变化下基于两性离子的不对称溶胀,蛋白质水凝胶软体机器人可以执行预设可控的弯曲/展开、螺旋/解螺旋等环境响应性驱动行为。
综上所述,作者提出了一种从分子层面调控LCST 型和两性离子型生物大分子刺激响应性的策略;通过基因工程协同化学工程的方法控制软体机器人中驱动层和制动层的拓扑结构,在有效防止了层分离的同时,高效构建可编程的自驱动软体机器人。该策略具有可设计、可调控、易加工、灵活简便等优势,有望进一步满足生物医用材料和医疗医药机器人领域的需求。
浙江大学爱丁堡大学联合学院黄雯雯团队博士生姬婷为论文第一作者,目前已毕业就职于西北师范大学;黄雯雯研究员为论文唯一通讯作者。相关工作得到国家自然科学基金项目和浙江省自然科学基金项目等项目资助。
原文链接:https://onlinelibrary.wiley.com/doi/10.1002/adhm.202470175





